
こんにちは!かにロボです。😊
今回のブログでは、YouTube/instagramに公開した【ロボット×ピタゴラ~Vol.2~】の裏側をご紹介します!
動画をまだご覧になっていない方は、ぜひこちらからチェックしてください👇
ピタゴラプログラミングの内容
準備
- 使用したロボット:toio×1台、mBot×1台
- プログラミングツール:
mBot用:mBlock
toio用:トイオ・プレイグラウンド- 「まっすぐ」カード
- 「ぶつかるまで まつ」カード

プログラミングのポイント
- toio:ボールが当たった衝撃でロボットが動き出す仕組みを作る
- mBot:超音波センサーで認識する障害物(ドミノ)に変化があったら、ロボットを回転させる仕組みを作る。回転によって、次のドミノを倒す。
プログラム方法
toio
「まっすぐ」カードにタッチ後、「ぶつかるまで まつ」カードにタッチする。
これで、ドミノがぶつかった衝撃でまっすぐ動き出すtoioが完成!

mBot
mBot正面の超音波センサーを利用して、以下のプログラムを作成する。
- 正面に障害物がある(ドミノが立っている)状態では、停止したまま
- 正面の障害物が無くなった(ドミノが倒れた)状態では、右回りに回転する
- 右回転することによって、右後ろにあるドミノを倒す
作成したプログラムは次のようになります。
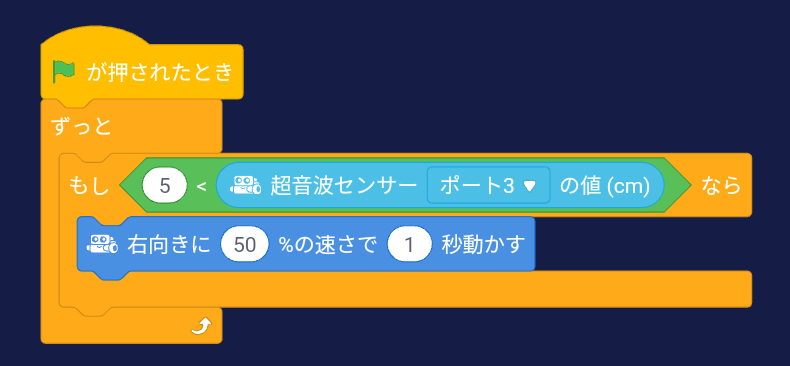
mBotの正面(5cm以下)にドミノを立てておき、ドミノが立っている間は何も処理をしません。ドミノが倒れて、超音波センサーの検出距離が5cmを上回ったら、右回転させます。それにより、次のドミノを倒します。
これらのプログラムを使うことで、動画にあるようなロボット×ピタゴラが完成します。是非皆さんも挑戦してみてください!
最後に
このブログでご紹介したプログラムを元に、オリジナルの仕掛け作りに挑戦してみてください。
また、新しい動画も続々公開予定ですので、YouTube/instagramのチャンネル登録もお忘れなく!✨



